CSOUND
AMPLITUDE AND PITCH TRACKING
Tracking the amplitude of an audio signal is a relatively simple procedure but simply following the amplitude values of the waveform is unlikely to be useful. An audio waveform will be bipolar, expressing both positive and negative values, so to start with, some sort of rectifying of the negative part of the signal will be required. The most common method of achieving this is to square it (raise to the power of 2) and then to take the square root. Squaring any negative values will provide positive results (-2 squared equals 4). Taking the square root will restore the absolute values.
An audio signal is an oscillating signal, periodically passing through amplitude zero but these zero amplitudes do not necessarily imply that the signal has decayed to silence as our brain perceives it. Some sort of averaging will be required so that a tracked amplitude of close to zero will only be output when the signal has settled close to zero for some time. Sampling a set of values and outputting their mean will produce a more acceptable sequence of values over time for a signal's change in amplitude. Sample group size will be important: too small a sample group may result in some residual ripple in the output signal, particularly in signals with only low frequency content, whereas too large a group may result in a sluggish response to sudden changes in amplitude. Some judgement and compromise is required.
The procedure described above is implemented in the following example. A simple audio note is created that ramps up and down according to a linseg envelope. In order to track its amplitude, audio values are converted to k-rate values and are then squared, then square rooted and then written into sequential locations of an array 31 values long. The mean is calculated by summing all values in the array and divided by the length of the array. This procedure is repeated every k-cycle. The length of the array will be critical in fine tuning the response for the reasons described in the preceding paragraph. Control rate (kr) will also be a factor therefore is taken into consideration when calculating the size of the array. Changing control rate (kr) or number of audio samples in a control period (ksmps) will then no longer alter response behaviour.
EXAMPLE 05L01_Amplitude_Tracking_First_Principles.csd
<CsoundSynthesizer>
<CsOptions>
-dm0 -odac
</CsOptions>
<CsInstruments>
sr = 44100
ksmps = 16
nchnls = 1
0dbfs = 1
; a rich waveform
giwave ftgen 1,0, 512, 10, 1,1/2,1/3,1/4,1/5
instr 1
; create an audio signal
aenv linseg 0,p3/2,1,p3/2,0 ; triangle shaped envelope
aSig poscil aenv,300,giwave ; audio oscillator
out aSig ; send audio to output
; track amplitude
kArr[] init 500 / ksmps ; initialise an array
kNdx init 0 ; initialise index for writing to array
kSig downsamp aSig ; create k-rate version of audio signal
kSq = kSig ^ 2 ; square it (negatives become positive)
kRoot = kSq ^ 0.5 ; square root it (restore absolute values)
kArr[kNdx] = kRoot ; write result to array
kMean = sumarray(kArr) / lenarray(kArr) ; calculate mean of array
printk 0.1,kMean ; print mean to console
; increment index and wrap-around if end of the array is met
kNdx wrap kNdx+1, 0, lenarray(kArr)
endin
</CsInstruments>
<CsScore>
i 1 0 5
</CsScore>
</CsoundSynthesizer>
In practice it is not necessary for us to build our own amplitude tracker as Csound already offers several opcodes for the task. rms outputs a k-rate amplitude tracking signal by employing mathematics similar to those described above. follow outputs at a-rate and uses a sample and hold method as it outputs data, probably necessitating some sort of low-pass filtering of the output signal. follow2 also outputs at a-rate but smooths the output signal by different amounts depending on whether the amplitude is rising or falling.
A quick comparison of these three opcodes and the original method from first principles is given below:
The sound file used in all three comparisons is 'fox.wav' which can be found as part of the Csound HTML Manual download. This sound is someone saying: “the quick brown fox jumps over the lazy dog”.
First of all by employing the the technique exemplified in example 05L01, the amplitude following signal is overlaid upon the source signal:
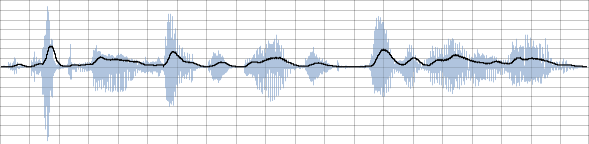
It can be observed that the amplitude tracking signal follows the amplitudes of the input signal reasonably well. A slight delay in response at sound onsets can be observed as the array of values used by the averaging mechanism fills with appropriately high values. As discussed earlier, reducing the size of the array will improve response at the risk of introducing ripple. Another approach to dealing with the issue of ripple is to low-pass filter the signal output by the amplitude follower. This is an approach employed by the follow2 opcode. The second thing that is apparent is that the amplitude following signal does not attain the peak value of the input signal. At its peaks, the amplitude following signal is roughly 1/3 of the absolute peak value of the input signal. How close it gets to the absolute peak amplitude depends somewhat on the dynamic nature of the input signal. If an input signal sustains a peak amplitude for some time then the amplitude following signal will tend to this peak value.
The rms opcode employs a method similar to that used in the previous example but with the convenience of an encapsulated opcode. Its output superimposed upon the waveform is shown below:
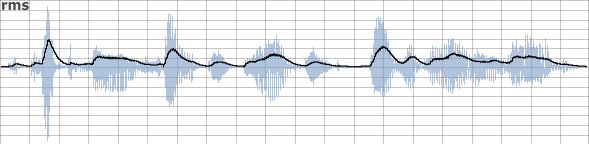
Its method of averaging uses filtering rather than simply taking a mean of a buffer of amplitude values. rms allows us to set the cutoff frequency (kCf) of its internal filter:
kRms rms aSig, kCf
This is an optional argument which defaults to 10. Lowering this value will dampen changes in rms and smooth out ripple, raising it will improve the response but increase the audibility of ripple. A choice can be made based on some foreknowledge of the input audio signal: dynamic percussive input audio might demand faster response whereas audio that dynamically evolves gradually might demand greater smoothing.
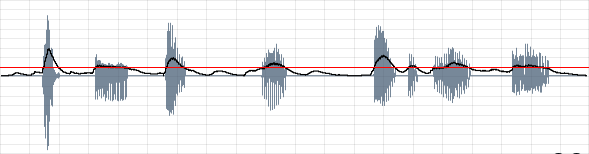
The follow opcode uses a sample-and-hold mechanism when outputting the tracked amplitude. This can result in a stepped output that might require addition lowpass filtering before use. We actually defined the period, the duration for which values are held, using its second input argument. The update rate will be one over the period. In the following example the audio is amplitude tracked using the following line:
aRms follow aSig, 0.01
with the following result:
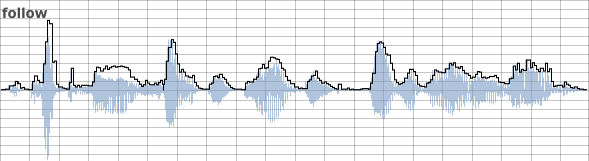
The hump over the word spoken during the third and fourth time divisions initially seem erroneous but it is a result of greater amplitude excursion into the negative domain. follow provides a better reflection of absolute peak amplitude.
follow2 uses a different algorithm with smoothing on both upward and downward slopes of the tracked amplitude. We can define different values for attack and decay time. In the following example the decay time is much longer than the attack time. The relevant line of code is:
iAtt = 0.04 iRel = 0.5 aTrk follow2 aSig, 0.04, 0.5
and the result of amplitude tracking is:
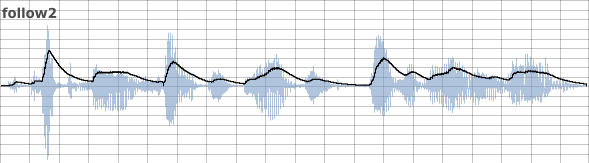
This technique can be used to extend the duration of short input sound events or triggers. Note that the attack and release times for follow2 can also be modulated at k-rate.
Dynamic Gating and Amplitude Triggering
Once we have traced the changing amplitude of an audio signal it is straightforward to use specific changes in that function to trigger other events within Csound. The simplest technique would be to simply define a threshold above which one thing happens and below which something else happens. A crude dynamic gating of the signal above could be implemented thus:
EXAMPLE 05L02_Simple_Dynamic_Gate.csd
<CsoundSynthesizer> <CsOptions> -dm0 -odac </CsOptions> <CsInstruments> ksmps = 32 0dbfs = 1 ; this is a necessary definition, ; otherwise amplitude will be -32768 to 32767 instr 1 aSig diskin "fox.wav", 1 ; read sound file kRms rms aSig ; scan rms iThreshold = 0.1 ; rms threshold kGate = kRms > iThreshold ? 1 : 0 ; gate either 1 or zero aGate interp kGate ; interpolate to create smoother on->off->on switching aSig = aSig * aGate ; multiply signal by gate out aSig ; send to output endin </CsInstruments> <CsScore> i 1 0 10 </CsScore> </CsoundSynthesizer>
Once a dynamic threshold has been defined, in this case 0.1, the RMS value is interrogated every k-cycle as to whether it is above or below this value. If it is above, then the variable kGate adopts a value of '1' (open) or if below, kGate is zero (closed). This on/off switch could just be multiplied to the audio signal to turn it on or off according to the status of the gate but clicks would manifest each time the gates opens or closes so some sort of smoothing or ramping of the gate signal is required. In this example I have simply interpolated it using the 'interp' opcode to create an a-rate signal which is then multiplied to the original audio signal. This means that a linear ramp with be added across the duration of a k-cycle in audio samples – in this case 32 samples. A more elaborate approach might involve portamento and low-pass filtering.
The results of this dynamic gate are shown below:
The threshold is depicted as a red line. It can be seen that each time the RMS value (the black line) drops below the threshold the audio signal (blue waveform) is muted.
The simple solution described above can prove adequate in applications where the user wishes to sense sound event onsets and convert them to triggers but in more complex situations, in particular when a new sound event occurs whilst the previous event is still sounding and pushing the RMS above the threshold, this mechanism will fail. In these cases triggering needs to depend upon dynamic change rather than absolute RMS values. If we consider a two-event sound file where two notes sound on a piano, the second note sounding while the first is still decaying, triggers generated using the RMS threshold mechanism from the previous example will only sense the first note onset. (In the diagram below this sole trigger is illustrated by the vertical black line.) Raising the threshold might seem to be remedial action but is not ideal as this will prevent quietly played notes from generating triggers.
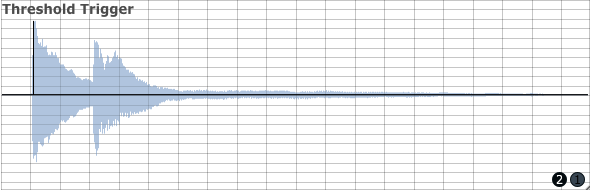
It will often be more successful to use magnitudes of amplitude increase to decide whether to generate a trigger or not. The two critical values in implementing such a mechanism are the time across which a change will be judged ('iSampTim' in the example) and the amount of amplitude increase that will be required to generate a trigger (iThresh). An additional mechanism to prevent double triggerings if an amplitude continues to increase beyond the time span of a single sample period will also be necessary. What this mechanism will do is to bypass the amplitude change interrogation code for a user-definable time period immediately after a trigger has been generated (iWait). A timer which counts elapsed audio samples (kTimer) is used to time how long to wait before retesting amplitude changes.
If we pass our piano sound file through this instrument, the results look like this:

This time we correctly receive two triggers, one at the onset of each note.
The example below tracks audio from the sound-card input channel 1 using this mechanism.
EXAMPLE 05L03_Dynamic_Trigger.csd
<CsoundSynthesizer> <CsOptions> -dm0 -iadc -odac </CsOptions> <CsInstruments> sr = 44100 ksmps = 32 nchnls = 2 0dbfs = 1 instr 1 iThresh = 0.1 ; change threshold aSig inch 1 ; live audio in iWait = 1000 ; prevent repeats wait time (in samples) kTimer init 1001 ; initial timer value kRms rms aSig, 20 ; track amplitude iSampTim = 0.01 ; time across which change in RMS will be measured kRmsPrev delayk kRms, iSampTim ; delayed RMS (previous) kChange = kRms - kRmsPrev ; change if(kTimer>iWait) then ; if we are beyond the wait time... kTrig = kChange > iThresh ? 1 : 0 ; trigger if threshold exceeded kTimer = kTrig == 1 ? 0 : kTimer ; reset timer when a trigger generated else ; otherwise (we are within the wait time buffer) kTimer += ksmps ; increment timer kTrig = 0 ; cancel trigger endif schedkwhen kTrig,0,0,2,0,0.1 ; trigger a note event endin instr 2 aEnv transeg 0.2, p3, -4, 0 ; decay envelope aSig poscil aEnv, 400 ; 'ping' sound indicator out aSig ; send audio to output endin </CsInstruments> <CsScore> i 1 0 [3600*24*7] </CsScore> </CsoundSynthesizer>
Pitch Tracking
Csound currently provides five opcode options for pitch tracking. In ascending order of newness they are: pitch, pitchamdf, pvspitch, ptrack and plltrack. Related to these opcodes are pvscent and centroid but rather than track the harmonic fundamental, they track the spectral centroid of a signal. An example and suggested application for centroid is given a little later on in this chapter.
Each offers a slightly different set of features – some offer simultaneous tracking of both amplitude and pitch, some only pitch tracking. None of these opcodes provide more than one output for tracked frequency therefore none offer polyphonic tracking although in a polyphonic tone the fundamental of the strongest tone will most likely be tracked. Pitch tracking presents many more challenges than amplitude tracking therefore a degree of error can be expected and will be an issue that demands addressing. To get the best from any pitch tracker it is important to consider preparation of the input signal – either through gating or filtering – and also processing of the output tracking data, for example smoothing changes through the use of filtering opcode such as port, median filtering to remove erratic and erroneous data and a filter to simply ignore obviously incorrect data. Parameters for these procedures will rely upon some prior knowledge of the input signal, the pitch range of an instrument for instance. A particularly noisy environment or a distant microphone placement might demand more aggressive noise gating. In general some low-pass filtering of the input signal will always help in providing a more stable frequency tracking signal. Something worth considering is that the attack portion of a note played on an acoustic instrument generally contains a lot of noisy, harmonically chaotic material. This will tend to result in slightly chaotic movement in the pitch tracking signal, we may therefore wish to sense the onset of a note and only begin tracking pitch once the sustain portion has begun. This may be around 0.05 seconds after the note has begun but will vary from instrument to instrument and from note to note. In general lower notes will have a longer attack. However we do not really want to overestimate the duration of this attack stage as this will result in a sluggish pitch tracker. Another specialised situation is the tracking of pitch in singing – we may want to gate sibilant elements ('sss', 't' etc.). pvscent can be useful in detecting the difference between vowels and sibilants.
'pitch' is the oldest of the pitch tracking opcodes on offer and provides the widest range of input parameters.
koct, kamp pitch asig, iupdte, ilo, ihi, idbthresh [, ifrqs] [, iconf] \
[, istrt] [, iocts] [, iq] [, inptls] [, irolloff] [, iskip]
This makes it somewhat more awkward to use initially (although many of its input parameters are optional) but some of its options facilitate quite specialised effects. Firstly it outputs its tracking signal in 'oct' format. This might prove to be a useful format but conversion to other formats is easy anyway. Apart from a number of parameters intended to fine tune the production of an accurate signal it allows us to specify the number of octave divisions used in quantising the output. For example if we give this a value of 12 we have created the basis of a simple chromatic 'autotune' device. We can also quantise the procedure in the time domain using its 'update period' input. Material with quickly changing pitch or vibrato will require a shorter update period (which will demand more from the CPU). It has an input control for 'threshold of detection' which can be used to filter out and disregard pitch and amplitude tracking data beneath this limit. Pitch is capable of very good pitch and amplitude tracking results in real-time.
pitchamdf uses the so-called 'Average Magnitude Difference Function' method. It is perhaps slightly more accurate than pitch as a general purpose pitch tracker but its CPU demand is higher.
pvspitch uses streaming FFT technology to track pitch. It takes an f-signal as input which will have to be created using the pvsanal opcode. At this step the choice of FFT size will have a bearing upon the performance of the pvspitch pitch tracker. Smaller FFT sizes will allow for faster tracking but with perhaps some inaccuracies, particularly with lower pitches whereas larger FFT sizes are likely to provide for more accurate pitch tracking at the expense of some time resolution. pvspitch tries to mimic certain functions of the human ear in how it tries to discern pitch. pvspitch works well in real-time but it does have a tendency to jump its output to the wrong octave – an octave too high – particularly when encountering vibrato.
ptrack also makes uses of streaming FFT but takes an normal audio signal as input, performing the FFT analysis internally. We still have to provide a value for FFT size with the same considerations mentioned above. ptrack is based on an algorithm by Miller Puckette, the co-creator of MaxMSP and creator of PD. ptrack also works well in real-time but it does have a tendency to jump to erroneous pitch tracking values when pitch is changing quickly or when encountering vibrato. Median filtering (using the mediank opcode) and filtering of outlying values might improve the results.
plltrack uses a phase-locked loop algorithm in detecting pitch. plltrack is another efficient real-time option for pitch tracking. It has a tendency to gliss up and down from very low frequency values at the start and end of notes, i.e. when encountering silence. This effect can be minimised by increasing its 'feedback' parameter but this can also make pitch tracking unstable over sustained notes.
In conclusion, pitch is probably still the best choice as a general purpose pitch tracker, pitchamdf is also a good choice. pvspitch, ptrack and plltrack all work well in real-time but might demand additional processing to remove errors.
pvscent and centroid are a little different to the other pitch trackers in that, rather than try to discern the fundemental of a harmonic tone, they assess what the centre of gravity of a spectrum is. An application for this is in the identification of different instruments playing the same note. Softer, darker instruments, such as the french horn, will be characterised by a lower centroid to that of more shrill instruments, such as the violin.
Both opcodes use FFT. Centroid works directly with an audio signal input whereas pvscent requires an f-sig input. Centroid also features a trigger input which allows us to manually trigger it to update its output. In the following example we use centroid to detect individual drums sounds – bass drum, snare drum, cymbal – within a drum loop. We will use the dynamic amplitude trigger from earlier on in this chapter to detect when sound onsets are occurring and use this trigger to activate centroid and also then to trigger another instrument with a replacement sound. Each percussion instrument in the original drum loop will be replaced with a different sound: bass drums will be replaced with a kalimba/thumb piano sound, snare drums will be replaced by hand claps (a la TR-808), and cymbal sounds will be replaced with tambourine sounds. The drum loop used is beats.wav which can be found with the download of the Csound HTML manual (and within the Csound download itself). This loop is not ideal as some of the instruments coincide with one another – for example, the first consists of a bass drum and a snare drum played together. The 'beat replacer' will inevitably make a decision one way or the other but is not advanced enough to detect both instruments playing simultaneously. The critical stage is the series of if... elseifs... at the bottom of instrument 1 where decisions are made about instruments' identities according to what centroid band they fall into. The user can fine tune the boundary division values to modify the decision making process. centroid values are also printed to the terminal when onsets are detected which might assist in this fine tuning.
EXAMPLE 05L04_Drum_Replacement.csd
<CsoundSynthesizer>
<CsOptions>
-dm0 -odac
</CsOptions>
<CsInstruments>
sr = 44100
ksmps = 32
nchnls = 1
0dbfs = 1
instr 1
asig diskin "beats.wav",1
iThreshold = 0.05
iWait = 0.1*sr
kTimer init iWait+1
iSampTim = 0.02 ; time across which RMS change is measured
kRms rms asig ,20
kRmsPrev delayk kRms,iSampTim ; rms from earlier
kChange = kRms - kRmsPrev ; change (+ve or -ve)
if kTimer > iWait then ; prevent double triggerings
; generate a trigger
kTrigger = kChange > iThreshold ? 1 : 0
; if trigger is generated, reset timer
kTimer = kTrigger == 1 ? 0 : kTimer
else
kTimer += ksmps ; increment timer
kTrigger = 0 ; clear trigger
endif
ifftsize = 1024
; centroid triggered 0.02 after sound onset to avoid noisy attack
kDelTrig delayk kTrigger,0.02
kcent centroid asig, kDelTrig, ifftsize ; scan centroid
printk2 kcent ; print centroid values
if kDelTrig==1 then
if kcent>0 && kcent<2500 then ; first freq. band
event "i","Cowbell",0,0.1
elseif kcent<8000 then ; second freq. band
event "i","Clap",0,0.1
else ; third freq. band
event "i","Tambourine",0,0.5
endif
endif
endin
instr Cowbell
kenv1 transeg 1,p3*0.3,-30,0.2, p3*0.7,-30,0.2
kenv2 expon 1,p3,0.0005
kenv = kenv1*kenv2
ipw = 0.5
a1 vco2 0.65,562,2,0.5
a2 vco2 0.65,845,2,0.5
amix = a1+a2
iLPF2 = 10000
kcf expseg 12000,0.07,iLPF2,1,iLPF2
alpf butlp amix,kcf
abpf reson amix, 845, 25
amix dcblock2 (abpf*0.06*kenv1)+(alpf*0.5)+(amix*0.9)
amix buthp amix,700
amix = amix*0.5*kenv
out amix
endin
instr Clap
if frac(p1)==0 then
event_i "i", p1+0.1, 0, 0.02
event_i "i", p1+0.1, 0.01, 0.02
event_i "i", p1+0.1, 0.02, 0.02
event_i "i", p1+0.1, 0.03, 2
else
kenv transeg 1,p3,-25,0
iamp random 0.7,1
anoise dust2 kenv*iamp, 8000
iBPF = 1100
ibw = 2000
iHPF = 1000
iLPF = 1
kcf expseg 8000,0.07,1700,1,800,2,500,1,500
asig butlp anoise,kcf*iLPF
asig buthp asig,iHPF
ares reson asig,iBPF,ibw,1
asig dcblock2 (asig*0.5)+ares
out asig
endif
endin
instr Tambourine
asig tambourine 0.3,0.01 ,32, 0.47, 0, 2300 , 5600, 8000
out asig ;SEND AUDIO TO OUTPUTS
endin
</CsInstruments>
<CsScore>
i 1 0 10
</CsScore>
</CsoundSynthesizer>